7.1 Single-view Metrology and Cameras
Review: Projection Matrix
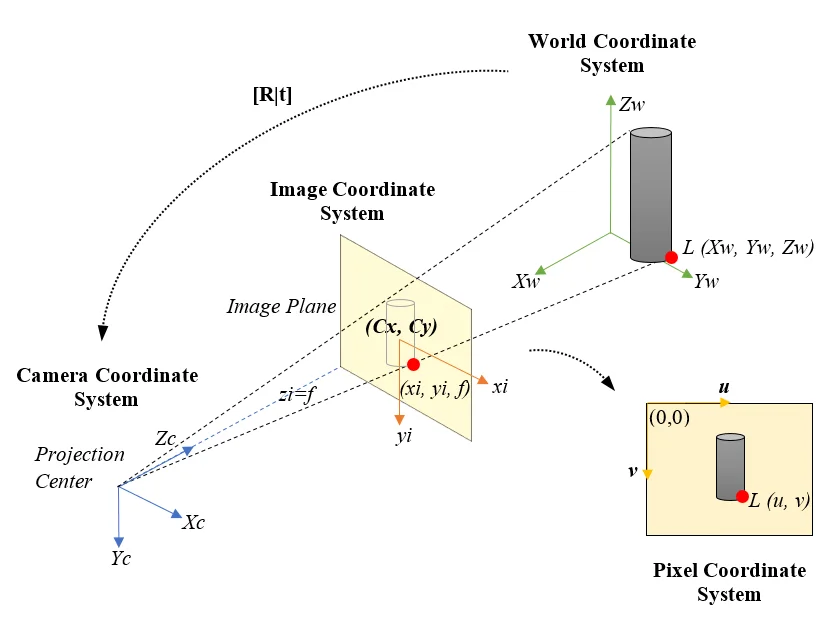
Formula Recap
where
- 3-D world coordinates
- Image pixel coordinates
- Intrinsic parameters
- extrinsic parameters
Matrix Components
Intrinsic Matrix K:
| Parameter | Meaning | Visual Effect |
|---|---|---|
| focal length | controls field of view (zoom in/out) | |
| skew | shears the image horizontally | |
| aspect ratio (y-scaling) | stretches/compresses vertically | |
| principal point | shifts the image center |
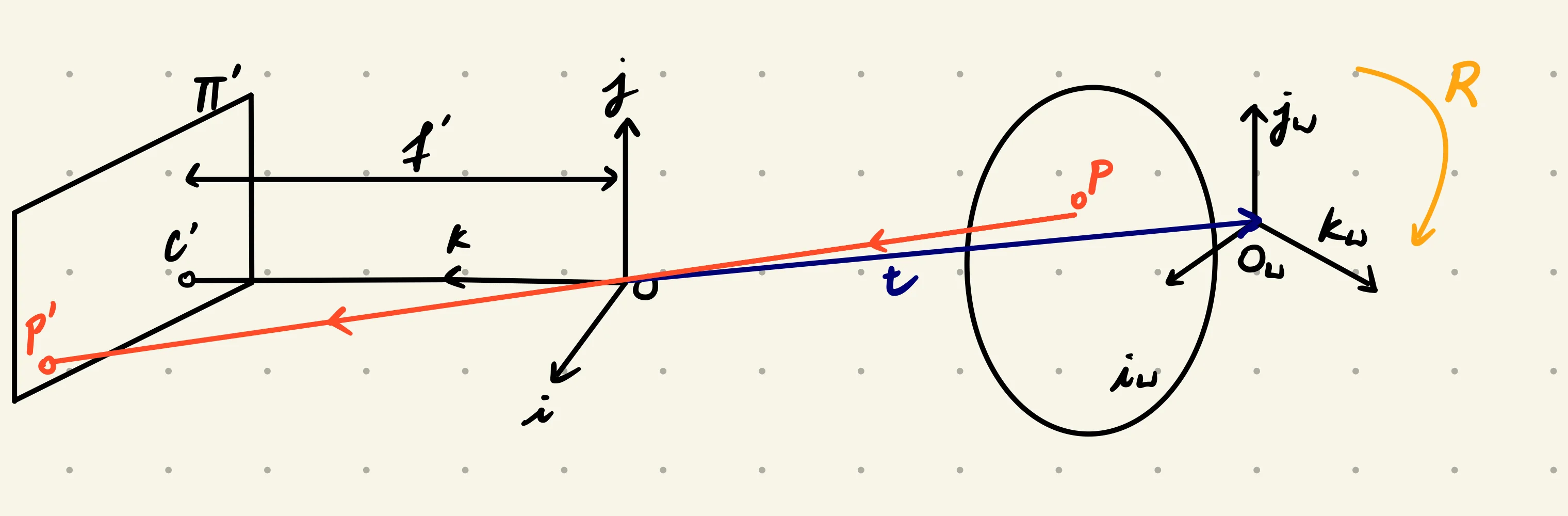
Extrinsic Matrix [R | t]
| Parameter | Meaning | Visual Effect |
|---|---|---|
| rotation matrix | rotates the camera view around x, y, z | |
| translation vector | moves the camera in world space |
Take-home Questions
1. Suppose the camera axis is in the direction of (x = 0, y = 0, z = 1) in its own coordinate system. What is the camera axis in world coordinates given the extrinsic parameters R, t
- What is the z-direction (the direction the camera is facing) given the rotation and translation matrix?
- is what we want
- The position of the camera is
- Since is 0, the position of the camera is the world coordinate is
- At infinity, translation is going to have no effect
- is just the column of the transposed rotation matrix
2. Suppose a camera at height observes a point at known to be on the ground . Assume is an identity matrix. What is the 3D position of the point in terms of f,
- Recall that the position of the camera is
- Now calculate the point in the camera’s coordinate, assuming that we know the intrinsic parameters
- Given that and
- Given that
Takeaway
- You have the following two equations to solve various kinds of problems
How to calibrate the camera?
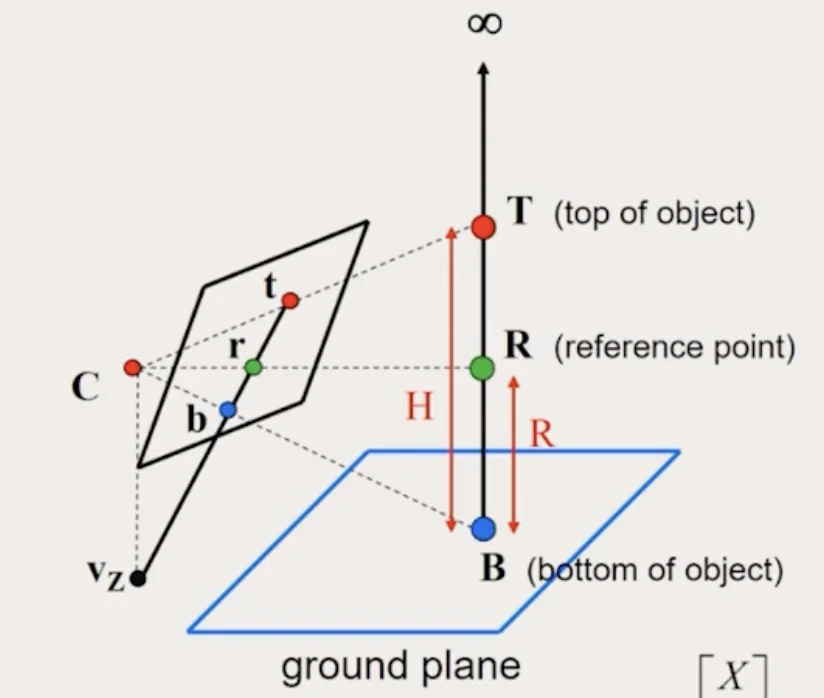
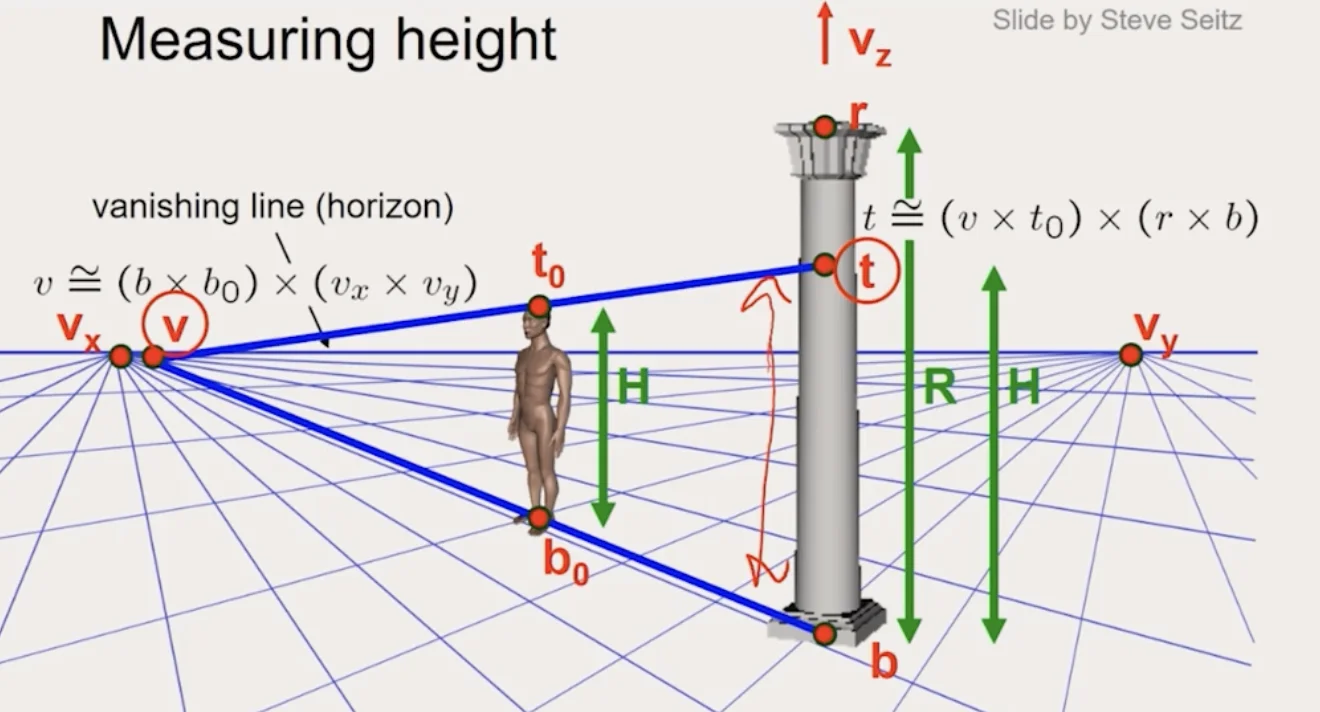
Height Measurement

- Objects along the same parallel lines are of the same height
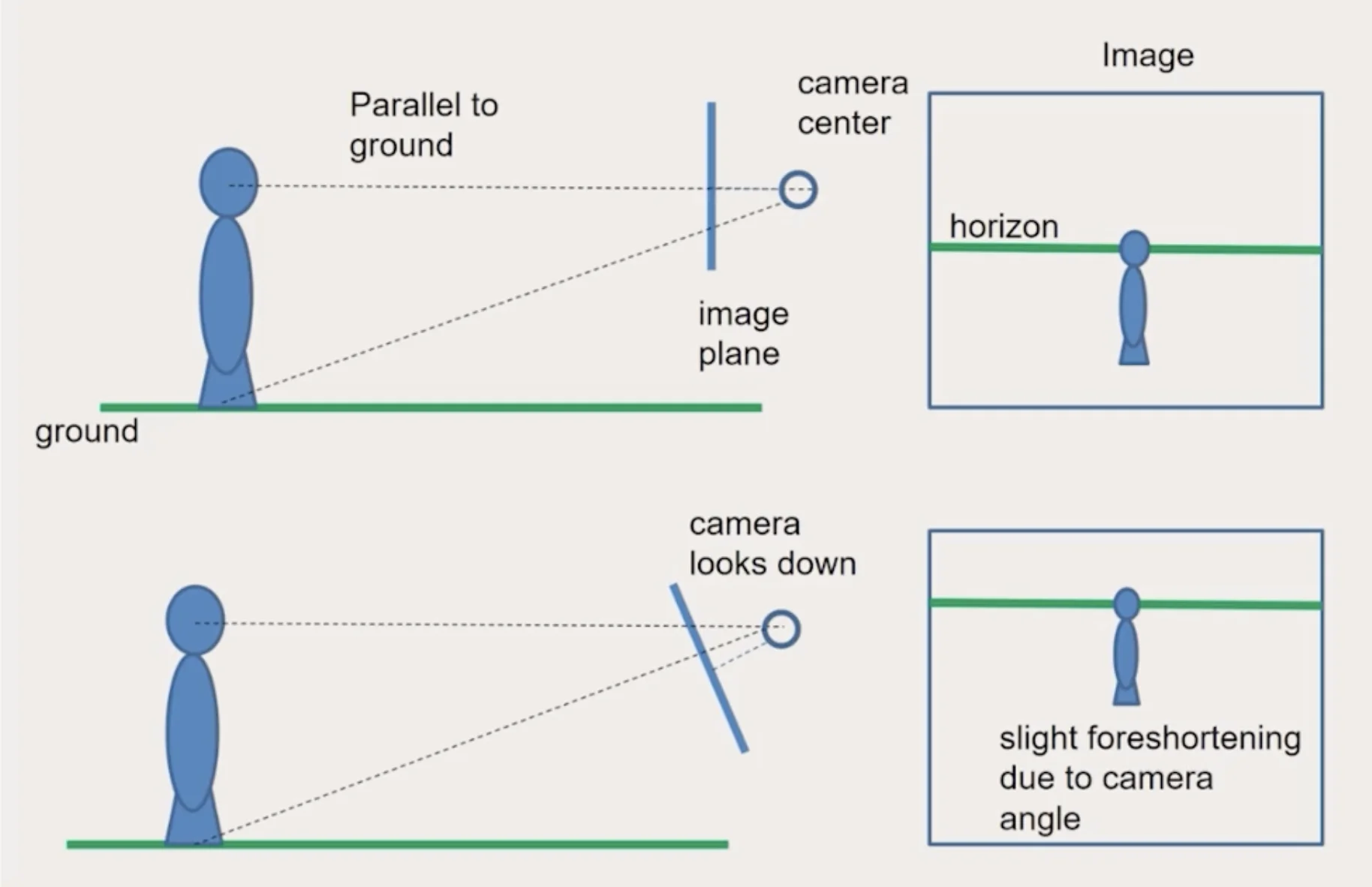
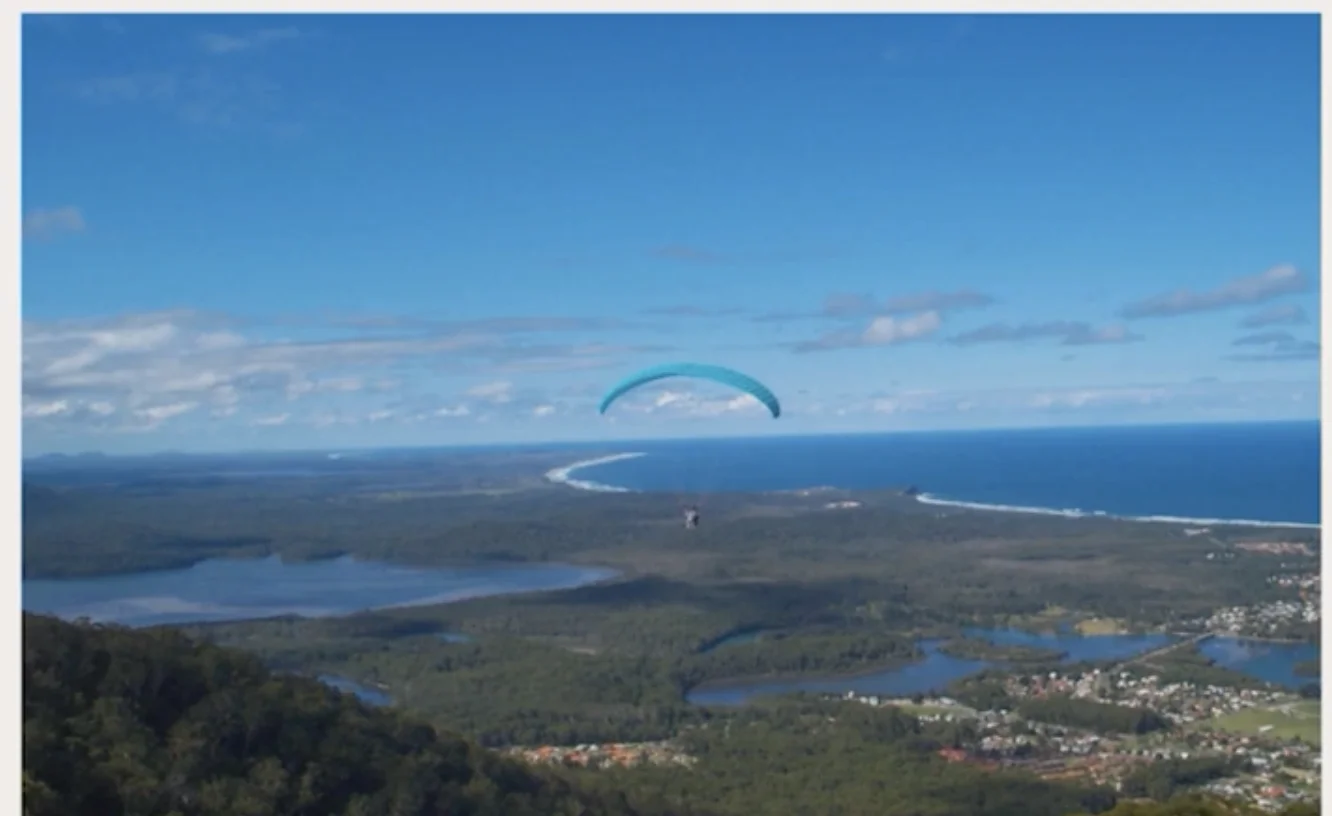
- Camera height is the height of horizon
- Parachute is higher than the camera while the person is than the camera
Cross Ratio
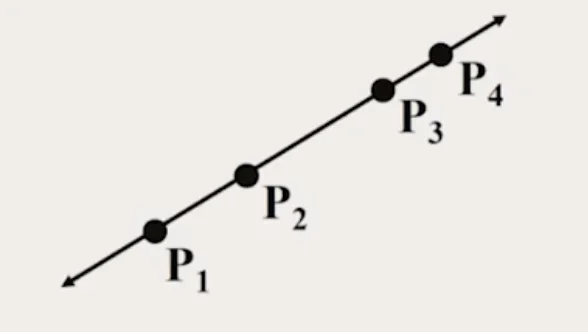
- Projective invariant
Example: The height of the man
Lens, Aperture, and DOF
| Goal (What We Want) | How We Get It | Effect / Explanation | Cost / Trade-off |
|---|---|---|---|
| More spatial resolution | Increase focal length (zoom in) | Magnifies the subject; effectively increases detail on the sensor | Reduces light reaching the sensor, narrows field of view (FOV) |
| Decrease focal length (wider lens) | Captures more area; lower magnification | Reduces depth of field (DOF); less background separation | |
| Broader field of view | Decrease focal length (wide-angle lens) | Captures a wider scene | Decreases DOF; may introduce distortion |
| More depth of field (DOF) | Decrease aperture (smaller opening → larger f-number) | Increases range of sharp focus from near to far | Reduces light; requires longer exposure or higher ISO |
| Increase aperture (larger opening → smaller f-number) | Decreases DOF, isolates subject with background blur | Gains light but loses focus range (shallow DOF) | |
| More temporal resolution | Shorten exposure time | Freezes fast motion; captures more frames per second | Reduces light; image may be underexposed |
| Lengthen exposure time | Increases light collection; motion blur can appear | Reduces temporal resolution (motion blur) |
Quick Reference — Aperture Effects

| Aperture Type | Description | Depth of Field | Light Intake | Typical Use |
|---|---|---|---|---|
| Large aperture (small f-number, e.g., f/1.8) | Wide lens opening | Shallow DOF (background blur) | More light | Portraits, low-light photography |
| Small aperture (large f-number, e.g., f/16) | Narrow lens opening | Deep DOF (sharp foreground + background) | Less light | Landscapes, daylight scenes |
Warning
The effect will not be great if the aperture is too small as you may encounter issues related to diffraction

Comprehensive List for Adjusting All the Camera Parameters
| Parameter | What It Controls | If You Increase It | If You Decrease It | Affects Field of View (FOV)? | Affects Depth of Field (DOF)? | Other Key Effects |
|---|---|---|---|---|---|---|
| Aperture (f-stop ↓) | Lens opening size | Larger opening → more light (brighter image) Shallower DOF (blurred background) | Smaller opening → less light (darker image) Deeper DOF (more in focus) | ❌ No | ✅ Strongly | Controls exposure and background blur |
| Shutter Time | Duration sensor is exposed to light | Longer → more light Motion blur increases | Shorter → less light Motion frozen | ❌ No | ❌ No | Controls motion blur and brightness |
| Focal Length | Lens zoom / magnification | Narrows FOV (zoom in) Shallower DOF | Widens FOV (zoom out) Deeper DOF | ✅ Yes | ✅ Yes | Affects perspective compression |
| ISO Sensitivity | Sensor’s light sensitivity | Brighter image More noise/grain | Darker image Cleaner image | ❌ No | ❌ No | Trade-off between brightness and noise |
| Sensor Size | Physical size of the imaging sensor | Wider FOV (for same focal length) Shallower DOF | Narrower FOV Deeper DOF | ✅ Yes | ✅ Yes | Larger sensors perform better in low light |
| Focus Distance | Distance to subject | Focusing closer → shallower DOF | Focusing farther → deeper DOF | ❌ No | ✅ Yes | Macro shots have very thin DOF |
| Exposure (Overall) | Total light hitting the sensor | Increased by aperture ↑, shutter ↑, or ISO ↑ | Decreased by aperture ↓, shutter ↓, or ISO ↓ | ❌ No | Indirectly | Determines image brightness |
Key Takeaways
| Concept | Definition | Main Controls | Typical Use |
|---|---|---|---|
| Field of View (FOV) | How much of the scene is captured in the frame | Focal length, sensor size | Wide landscape vs. zoomed portrait |
| Depth of Field (DOF) | How much of the depth range appears in focus | Aperture, focal length, focus distance, sensor size | Portraits (shallow) vs. landscapes (deep) |
| Exposure | Brightness of the image | Aperture, shutter time, ISO | Properly balanced image |